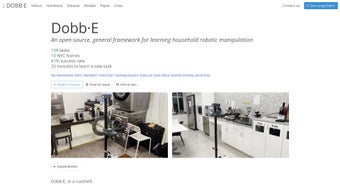
Innowacyjny framework do nauki robotów
Dobb·E to otwartoźródłowy framework, który umożliwia naukę robotów wykonywania zadań domowych poprzez imitację. Dzięki wykorzystaniu narzędzia o nazwie Stick, które łączy elementy 3D i prosty chwytak, Dobb·E umożliwia zbieranie danych z zestawu Homes of New York, zawierającego 13 godzin interakcji w 22 domach. Zgromadzone dane obejmują filmy RGB i głębokości oraz adnotacje akcji, co pozwala na efektywną naukę robotów.
Najczęściej polecana alternatywa
Framework Dobb·E wykorzystuje model HPR oparty na architekturze ResNet-34, który po przetrenowaniu potrafi osiągnąć średni wskaźnik sukcesów na poziomie 81% w rozwiązywaniu nowych zadań w ciągu 15 minut. Użytkownicy mają dostęp do pretrenowanych modeli, kodu oraz dokumentacji na platformie GitHub, a także mogą zapoznać się z otwartym artykułem naukowym na temat metodologii i wyników Dobb·E.